RD01 – Operatore ROBODRILL
Elena2023-11-07T15:17:47+01:00Il corso Operatore prevede la descrizione delle operazioni essenziali per la conduzione di una macchina ROBODRILL.
Il corso Operatore prevede la descrizione delle operazioni essenziali per la conduzione di una macchina ROBODRILL.
Il corso fornisce una panoramica sugli strumenti di sviluppo e sull’integrazione delle librerie Robot Interface in ambiente di sviluppo MS Visual C++, MS Visual Basic/Visual Studio .NET.
Il software è stato creato per la completa programmazione e configurazione dei robot sia offline che a bordo macchina. Con il software HandlingPRO è possibile simulare la maggior parte delle funzioni dei robot FANUC nonché aggiornare e verificare i programmi già presenti su robot installati.
Il software è stato creato per la completa programmazione e configurazione dei robot sia offline che a bordo macchina. Con il software Handling-PRO è possibile simulare la maggior parte delle funzioni dei robot FANUC nonché aggiornare e verificare i programmi già presenti su robot installati. Questo corso è indirizzato a progettisti, tecnici e programmatori incaricati della programmazione del Robot.
Il corso sulla funzione Line Tracking fornisce una panoramica completa sulla configurazione ed utilizzo del robot per applicazioni che richiedono di effettuare operazioni su oggetti in movimento.
Il corso sul sistema di visione iRVision fornisce una panoramica completa sull’interfaccia di configurazione tramite PC e sulla libreria degli strumenti di ricerca per la localizzazione del pezzo che deve essere manipolato dal robot.
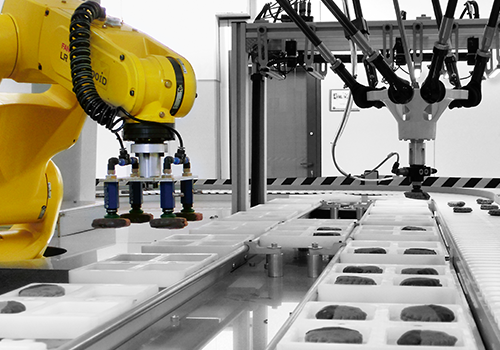
iRPickTool è un software specifico per rilevare oggetti in movimento su convogliatore, anche utilizzando telecamere, e permettere ai robot di prelevarli. Questo software consente la distribuzione del carico di lavoro su più robot. Supporta applicazioni di packaging con infeed/outfeed in movimento ma anche da stazioni fisse o buffer.
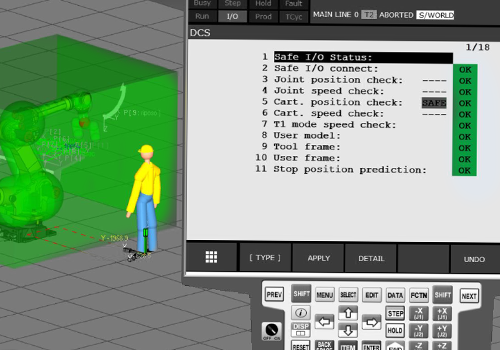
Il corso relativo alle funzioni DCS (Position/Speed Check e Safe I/O connect) fornisce una panoramica completa sulla configurazione delle zone di sicurezza e degli oggetti che vengono monitorati in tali aree. Vengono inoltre descritti i livelli di sicurezza raggiunti da ciascuna funzione DCS.
Il corso fornisce competenze approfondite sul linguaggio TPE e sull‘utilizzo delle funzioni opzionali più diffuse. Durante il corso verrà presentato il software per PC OLPCPRo, strumento di programmazione offline e diagnostica.
Il corso fornisce competenze approfondite sul linguaggio TPE e sull'utilizzo delle funzioni opzionali più diffuse. Adatto al personale dedicato alla programmazione e configurazione del sistema Handling Tool dei robot FANUC.